
Digital gesteuerte Kugelbahn
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Worum geht’s?

.

Material
- Material für den Bau einer Kugelbahn (siehe Challenge: Lass die Kugel rollen! (1))
- Schnur, Welle zum Aufwickeln der Schnur
- Calliope Set mit Batteriepack
- Computer zum Programmieren
- Kabel, Elektromotor mit Getriebe
- Cutter, Schere, Abisolierzange oder Seitenschneider
- Lötkolben und Lötzinn
.

So kann’s gehen…
- Konstruiere einen Kugelaufzug, der die Kugel nach oben ziehen kann.
- Verwende zum Beispiel eine Pappröhre als Aufzugsschacht.
- Baue eine Aufzugskabine, die du mit einer Schnur hochziehen kannst.
- Befestige die Welle an der Drehachse des Elektromotors (mit Getriebe).
- Befestige die Schnur so daran, dass sie aufgewickelt werden kann.
- Überprüfe, ob der Motor die Aufzugskabine mit der Kugel hochziehen kann, ohne dass sie seitlich runterfällt.
- Entwickle mit dem Calliope einen Mechanismus, der den Motor anschaltet, sobald die Kugel am Ziel ist. Du kannst einen Schalter bauen oder mit dem Helligkeits- oder Bewegungssensor experimentieren.
- Programmiere das Calliope auf https://makecode.calliope.cc/ so, dass sich der Motor nur so lange dreht, bis die Kugel oben ist. Anschliessend soll die Kabine alleine wieder in das Erdgeschoss zurückfahren.
.
.

Suche in diesen Kategorien nach geeigneten Befehlen.
.

Weitertüfteln
- Baue ein Zählwerk ein, das anzeigt, wie oft die Kugel wieder nach oben befördert wurde.
- Programmiere die Steuerung so, dass sie auf Klatschen reagiert oder dass sie 3mal hintereinander funktioniert.
- Vielleicht hast du auch ganz andere Ideen, wie du die Kugelbahn steuern willst.
Tipps und Tricks
Motor an Calliope anschliessen

Schliesse den Motor am zweiten und dritten Pin von Links an. Plus und Minus spielt keine Rolle.
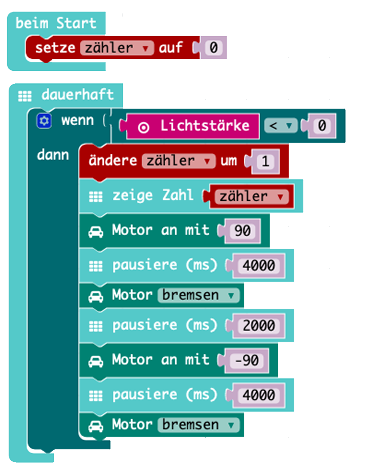
Eine einfache Aufzugssteuerung programmieren

Du kannst den Motor so steuern, dass er sich rechts oder links herum dreht. Wenn du ein Minuszeichen vor den Wert schreibst, dreht der Motor anders herum.
Wenn das Licht dunkler als der Wert 120 wird, dreht sich der Motor 4000 Millisekunden (4 Sekunden) rechts rum. Dann wartet er 2 Sekunden. Anschliessend dreht er 4 Sekunden links rum. Dann ist die Kabine wieder unten.
Für deinen Aufzug musst du die Werte natürlich anpassen.
Hinweise für Lehrpersonen

Der gesamte Content von makerstars.org/ ist creative commons lizenziert.
.
Didaktische Hintergrundinformationen zu dieser Challenge können Sie einsehen und downloaden, wenn Sie sich hier kostenlos anmelden.
[member]
Didaktische Hinweise
Die Challenge im Überblick
| Challenge | Zeit | Aufgabentyp | Schwierigkeitsgrad | Kreativität und Tüfteln |
|---|---|---|---|---|
| Mit Computer | 90+ Minuten; es handelt sich hierbei um eine Mindestzeitangabe! | Auftragsorientierte Umsetzung | schwer | technisches Problemlösen; Erfinden, Aufzugslösung konstruieren |
Das Entwickeln (technisches Problemlösen) und Erfinden stehen hier im Vordergrund. Die Schülerinnen und Schüler konstruieren ein interaktives System, das auf die Kugel reagiert, sobald sie ihren Endpunkt erreicht hat. Die Konstruktion des Aufzugs und die Programmierung erfordern ein hohes Mass an Tüftelgeist (insbesondere die Festlegung des Helligkeitsschwellenwerts). Gegebenenfalls finden die Schülerinnen und Schüler auch alternative Lösungen – beispielsweise mit einem Tastschalter oder mit dem Rüttelsensor/Lagesensor.
Challengecards – Download

Die Challengecard «Digitales Becherspiel» kann hier als pdf-Vorlage heruntergeladen werden. Der QR-Code auf der Challengecard leitet die Schülerinnen und Schüler direkt auf das betreffende Onlineangebot.
Lehrplanbezug (Lehrplan 21)
| Fach | Kompetenz | Kompetenzziele | Konkret in der Challenge |
|---|---|---|---|
| Natur, Mensch, Gesellschaft (NMG) | NMG.5.2.1f | Die SuS können Zeiten und Strecken messen und darstellen sowie Messgenauigkeiten einschätzen (z.B. Streckenmessung: Anzahl Schritte vs. Messband). | Die SuS können messen, wie lange die Kugel braucht, um die Strecke vom Sensor zum Kugelaufzug zu überbrücken. |
| Medien und Informatik (MI) | MI.2.2.f | Die SuS können Programme mit Schleifen, bedingten Anweisungen und Parametern schreiben und testen. | Die SuS verwenden Programmierbefehle wie «dauerhaft» (Schleife) oder mit «wenn-dann-Funktionen». Beim Weitertüfteln arbeiten sie mit Variablen, um die Kugelrunden via Display zu zählen. |
| MI.2.3.l | Die SuS kennen die wesentlichen Eingabe-, Verarbeitungs- und Ausgabeelemente von Informatiksystemen und können diese mit den entsprechenden Funktionen von Lebewesen vergleichen (Sensor, Prozessor, Aktor und Speicher). | Die SuS steuern einen Elektromotor mit Sensoren an (z.B. Helligkeitssensor). | |
| MI.2.2.g | Die SuS können selbstentdeckte Lösungswege für einfache Probleme in Form von lauffähigen und korrekten Computerprogrammen mit Schleifen, bedingten Anweisungen und Parametern formulieren. | Die SuS können das Aufzugsteuerprogramm so optimieren, dass die Kugel hochgezogen und der Aufzug anschliessend wieder in die Ausgangsposition zurückversetzt wird. | |
| MI.2.2h | Die SuS können selbstentwickelte Algorithmen in Form von lauffähigen und korrekten Computerprogrammen mit Variablen und Unterprogrammen formulieren. | Die SuS verwenden Variablen, um die Kugeldurchlaufrunden digital zählen zu lassen. | |
| Technisches und textiles Gestalten (TTG) | TTG.2.A.2b | Die SuS können zu ausgewählten Aspekten Lösungen suchen und eigene Produktideen entwickeln (z.B. Funktion, Konstruktion, Gestaltungselementen, Verfahren, Material). | Die SuS erfinden eine Lösung, wie sie die Kugel in die Startposition zurückversetzen lassen können. |
| TTG.2.A.3b | Die SuS können die formalen, funktionalen und konstruktiven Bedingungen der Aufgabenstellung berücksichtigen und für die Planung des Prozesses verwenden (z.B. Skizze, Plan, Arbeitsablauf, Schnittmuster, Modell). Die SuS können das geplante Produkt mit punktueller Unterstützung herstellen. | Die SuS können eine digital gesteuerte Kugelbahn konzipieren, geeignete Steuerbefehle und -verfahren ausloten und zielgerichtet umsetzen. |
Nötige Vorkenntnisse
Die Schülerinnen und Schüler müssen mit den Grundlagen der Programmierung des Calliope Mini Boards vertraut sein. Erfahrungen mit der Ansteuerung von Motoren sind von Vorteil. Zuvor sollte eine herkömmliche Kugelbahn gebaut worden sein (vgl. Challenge: «Lass die Kugel rollen»).
Hinweise zur pädagogischen Begleitung
Eine digitale Kugelbahn mit Selbstaufladung zu bauen, ist eine grosse Herausforderung. Das Projekt eignet sich für Schülerinnen und Schüler mit Durchhaltevermögen und mit hoher Frustrationstoleranz. Die Schwierigkeit besteht neben der Konstruktion eines Kugelaufzugs, der die Kugel am oberen Ende ausgibt, in der Programmierung des Helligkeitssensors. Es ist schwierig, den richtigen Schwellenwert zu finden, so dass das Calliope den Motor ansteuert, sobald die Kugel über den Helligkeitssensor gerollt ist.
Umfang mit dem Elektromotor
Die Challenge benötigt unbedingt einen Elektromotor mit Getriebe. Ein eigenes Übersetzungsgetriebe zu bauen, ist zu aufwendig. Damit der Elektromotor die Laufrichtung ändern kann, muss er unbedingt an Pin 2 und Pin 3 angeschlossen werden (s. Tipps und Tricks). Achtung: Mit der Standardstromversorgung des Calliope (ca. 3V) funktioniert der Motor nur, wenn mindestens 80% Leistung eingestellt sind. Wenn eine zusätzliche externe Stromversorgung verwendet wird, kann der Wert bis zu 65% liegen. Tiefere Werte liefern in der Regel kein befriedigendes Ergebnis.
Programmierung
Dieses Programm beinhaltet neben der Aufzugsteuerfunktion noch eine Zählfunktion.
[/member]