![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()








Worum geht’s?



Material
- Calliope mini mit Batteriebox
- 1 Servo mit Servohorn
- Krokodil-Servo-Kabel (Wenn du kein solches Kabel hast, dann lerne in der Krokodil-Servo-Kabel-Challenge, wie du eines machen kannst)
- Zweite Batteriebox mit 4 Batterien (1.5 V), Akkus 1.2 V oder eine 4.5 Volt Blockbatterie
- Karton, Eisendraht, normales und doppelseitiges Klebeband
- Fell und Gewichte (z.B. Muttern oder Schrauben)
- Anleitung Calliope für Mac oder PC
- Anleitung: Servo mit dem Calliope verbinden und steuern
- Computer zum Programmieren
- Zwei Calliopes, wenn du deinen Roboter fernsteuern willst


So kann’s gehen…
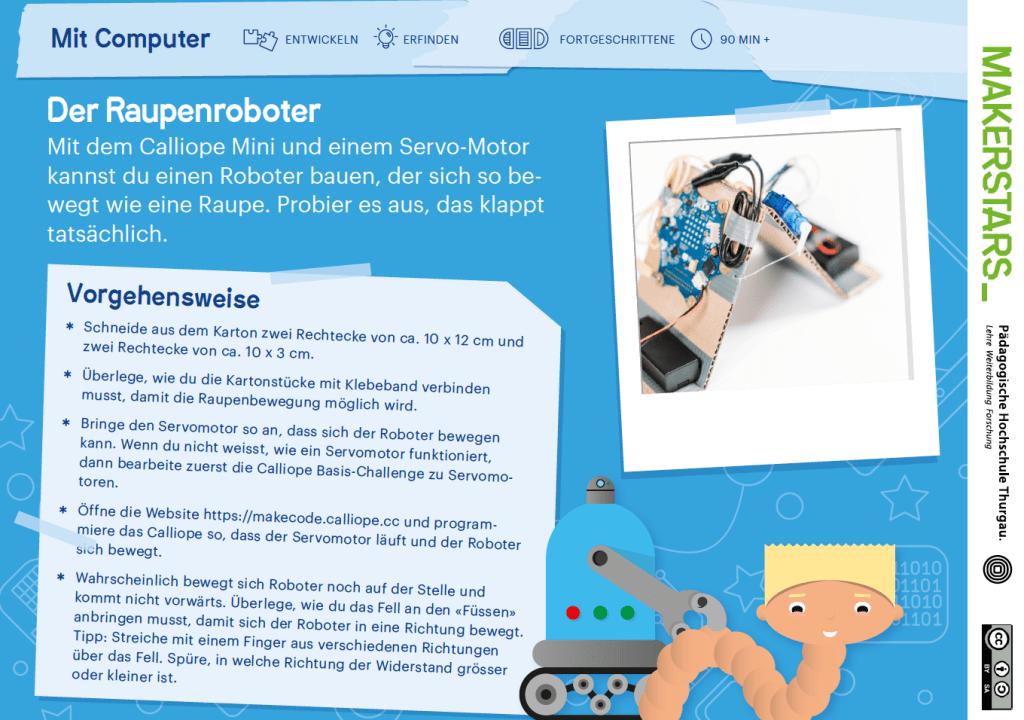
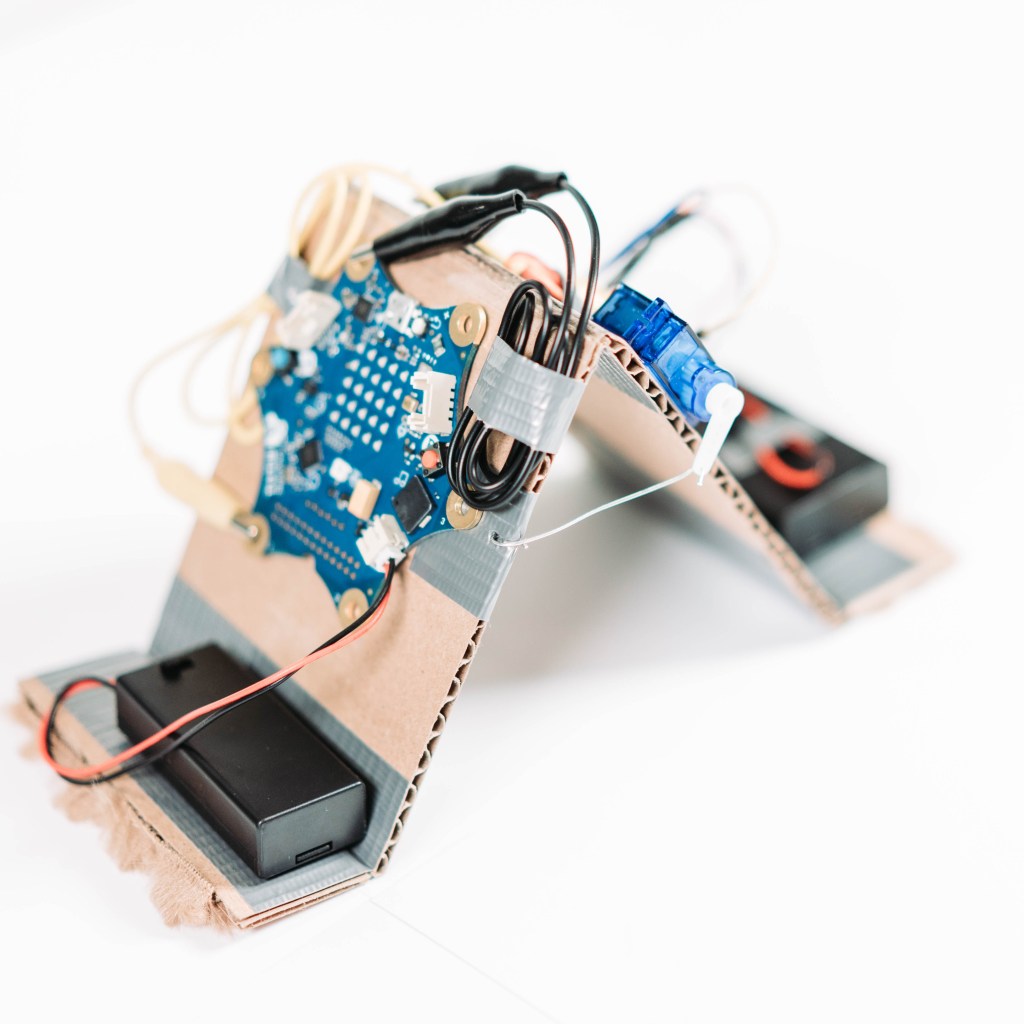
- Schneide aus dem Karton zwei Rechtecke von ca. 10 x 12 cm und zwei Rechtecke von ca. 10 x 3 cm.
- Überlege, wie du die Kartonstücke mit Klebeband verbinden musst, damit die Bewegung möglich wird.
- Überlege dir, wie du den Servomotor anbringen musst, damit sich der Roboter bewegt. Wenn du nicht weisst, wie ein Servomotor funktioniert, dann bearbeite zuerst die Calliope Servo-Challenge.
- Öffne die Website https://makecode.calliope.cc und programmiere das Calliope so, dass der Servomotor funktioniert und der Roboter sich bewegt.
- Wahrscheinlich bewegt sich Roboter noch an einer Stelle und kommt nicht vorwärts. Überlege, wie du das Fell an den „Füssen“ anbringen musst, damit sich der Roboter in eine Richtung bewegt. Tipp: Streiche mit einem Finger aus verschiedenen Richtungen über das Fell. Spüre, in welche Richtung der Widerstand grösser oder kleiner ist.


Diese Programmierbausteine kannst du für den Raupenroboter gut gebrauchen.


Weitertüfteln
- Programmiere das Calliope so, dass der Roboter mit einer Taste startet und mit der anderen stoppt. Du kannst auch das Display des Calliope so programmieren, dass ein Start- oder Stopp-Symbol angezeigt wird.
- Verwende ein zweites Calliope, um den Roboter fernzusteuern.
- Baue einen Vibrationsmotor so ein, dass damit die Richtung des Roboters gesteuert werden kann. Programmiere dann zwei Calliope so, dass du auch die Richtung fernsteuern kannst.
Tipps und Tricks
Hilfe beim Aufbau


Wenn sich der Roboter zwar bewegt, aber nur an einer Stelle bleibt, dann kann das folgende Gründe haben:
- Es hat kein Fell an den «Füssen»: Klebe unten an die Füsse je ein Stück Fell auf.
- Das Fell an den Füssen ist nicht richtig angebracht: Die Haare beider Felle müssen in die gleiche Richtung zeigen.
- Die Füsse berühren den Untergrund nicht richtig: Kontrolliere, ob sich die Füsse einfach nach oben und unten bewegen lassen. Oft helfen auch kleine Gewichte, die auf die Füsse geklebt werden können
- Der Untergrund ist zu glatt: Probiere, ob es auf einem grossen Papier oder auch einem anderen Untergrund geht.
Hilfe beim Programmieren


Damit sich das Servohorn am Servo bewegt, kannst du Werte zwischen 0° und 180° eingeben. Damit sich das Servohorn hin und her bewegt, brauchst du zwei Bausteine für das Servo und damit die Hin- und Herbewegung möglichst gross ist, musst du beim einen Baustein 0° und beim anderen 180° eingeben.
Das Servohorn braucht etwa eine Sekunde, um von der einen Position in die andere zu gelangen. Darum brauchst du den Baustein «pausiere (ms)» und den Wert 1000. Und weil das Servohorn ja hin und zurück muss, brauchst du den Baustein zweimal.

Damit der Roboter nicht nach einem Schritt aufhört, musst du die vier Bausteine noch in der richtigen Reihenfolge in die Schleife «Dauerhaft» einfügen.
Falls du noch mehr Tipps zum Programmieren oder zum Anschliessen eines Servomotors brauchst, kannst du die Calliope 7 – Servochallenge bearbeiten.
Hinweise für Lehrpersonen


Der gesamte Content von MakerStars.org ist creative commons lizenziert.
.
Didaktische Hintergrundinformationen zu dieser Challenge können Sie einsehen und downloaden, wenn Sie sich hier kostenlos anmelden.
[member]
Didaktische Hinweise
Die Challenge im Überblick
| Challenge | Zeit | Aufgabentyp | Schwierigkeitsgrad | Kreativität und Tüfteln |
|---|---|---|---|---|
| Mit Computer | 90+ Minuten; es handelt sich hierbei um eine Mindestzeitangabe! | Auftragsorientierte Umsetzung | mittel | technisches Problemlösen; |
Making-Aktivität: Entwickeln und Erforschen
Das Entwickeln (technisches Problemlösen) steht hier im Vordergrund. Der Bewegungsmechanismus des Roboters muss nicht neu erfunden werden, sondern ist vorgegeben. Es geht darum, mechanische Grundkonzepte anzuwenden und zu einem funktionierenden Prototypen zu verarbeiten (Kraftübertragung durch Hebel, Übersetzung einer Rotation in eine lineare Bewegung, unterschiedliche Reibungskräfte aufgrund unterschiedlicher Oberflächenbeschaffenheit).