
Interaktiver Kaugummiroboter
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Worum geht’s?

.
.

Material
- Pappe und PET-Flasche für das Gehäuse
- Cutter, Schere, Heissleim für die Montage
- Kabel, Seitenschneider oder Abisolierzange
- Calliope mit Batterie
- Computer mit Internetanschluss
- Elektromotor mit Getriebe, eventuell Schalter
- Lötkolben und Lötzinn
- Optional: Abstandssensor (Ultraschall)
- Kaugummis, Schokolinsen oder Gummibärchen
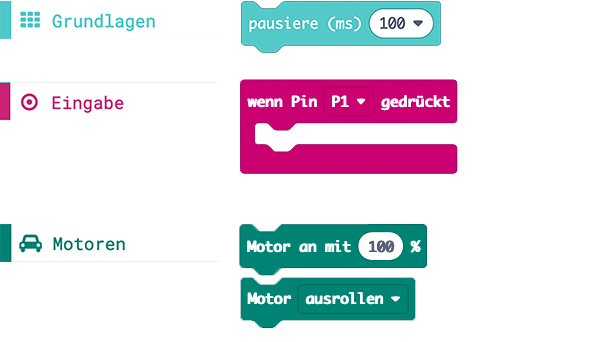
Diese Programmierbausteine helfen dir beim Entwickeln einer einfachen schaltergesteuerten Lösung. Anspruchsvollere Möglichkeiten mit Zusatzfunktionen findest du unten in den Tipps und Tricks.
.
.

So kann’s gehen…
- Überlege dir zuerst, wie die Kaugummis kontrolliert aus dem Behälter gelangen können.
- Wenn du keine Idee hast, kannst du in den Videos unten nachschauen.
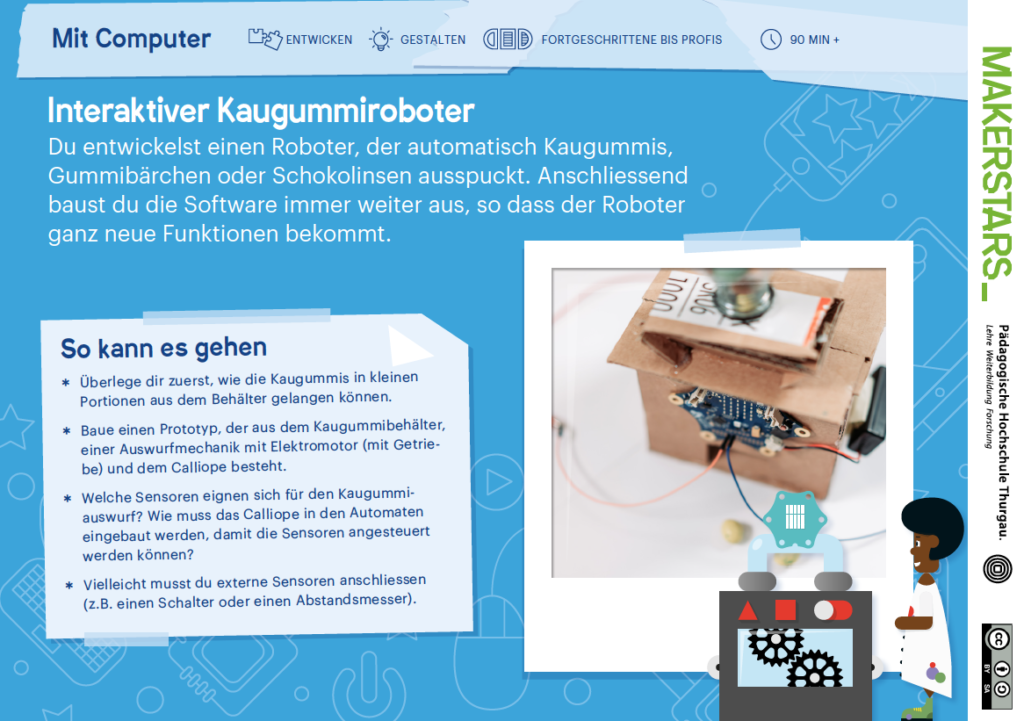
- Baue einen Prototypen, der aus dem Kaugummibehälter, einer Auswurfmechanik mit Elektromotor (mit Getriebe) und dem Calliope besteht.
- Welche Sensoren eignen sich für den Kaugummiauswurf? Wie muss das Calliope in den Automat eingebaut werden, damit die Sensoren angesteuert werden können? Vielleicht musst du externe Sensoren anschliessen (z. B. einen Schalter oder einen Abstandssensor).
.

Weitertüfteln
- Entwickle weitere Funktionen für deinen Automaten. Hier ein paar Ideen:
- der Automat zählt mit, wie oft er Kaugummis ausgespuckt hat;
- der Automat kann über zwei Schalter Kaugummis und Schokolinsen ausgeben.
- Konstruiere einen Automaten mit Münzeinwurf. Bei einer Fünffrankenmünze soll er mehr Kaugummis auswerfen, als bei einer Zwei- oder Einfrankenmünze.
- Baue deinen Roboter aus stabilem Holz und gestalte ihn so, dass er wie ein Roboter aussieht.
.
Tipps und Tricks
.
So schliesst du einen Tastschalter und einen Motor an das Calliope an.
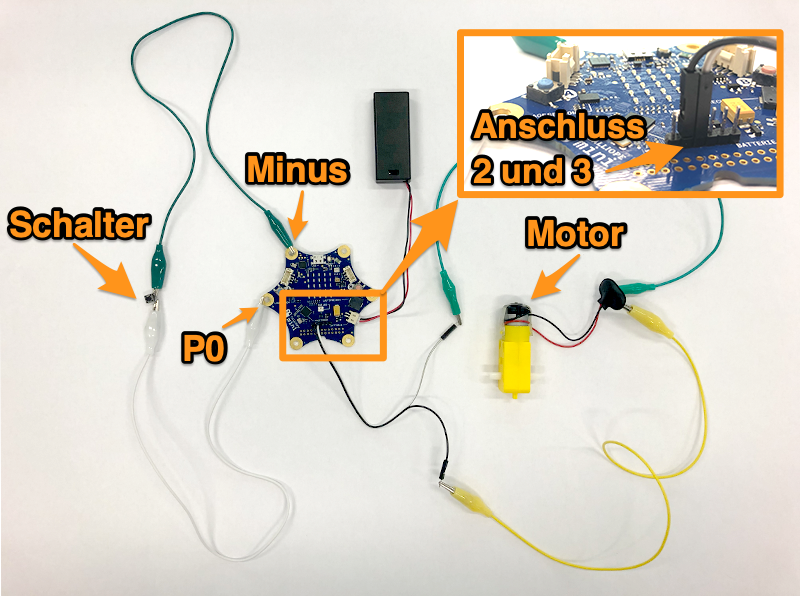
Schliesse den Tastschalter an P0 und an den Minuspol des Calliope an. Den Motor hängst du an die Anschlüsse 2 und 3. Hier spielt Plus und Minus keine Rolle.
Mit diesem Programm steuerst du den Kaugummi-Ausgabemotor an.
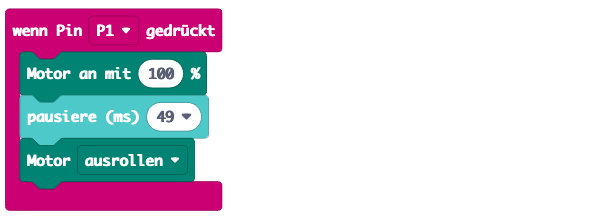
Mit diesem Programm kannst du einen Motor mit einem externen Schalter bedienen. Die Werte bei «Motor an» und «pausiere» musst du an deinen Ausgabemechanismus anpassen.
Der Motor läuft 49 Millisekunden und rollt dann aus. Der Wert darf nur sehr klein sein, sonst würde der Motor zu lang laufen und alle Kaugummis würden auf einmal aus dem Automat fallen.
So programmierst du ein Zählwerk für deinen Automaten.

Mit diesen 3 Programmteilen kannst du einen Zähler auf dem Calliopedisplay einrichten. Es zählt dann mit, wie oft der Schalter gedrückt wurde. Dafür muss die eine neue Variable anlegen (zum Beispiel: «zählen»). Am Anfang muss die Zahl auf Null gesetzt werden.
Wenn der Pin P0 gedrückt wird, zählt die Variable «zählen» eins hinzu. Die gezählte Zahl wird auf dem Display angezeigt (zeige Zahl «zählen».).
So kannst du die Ausgabe über Helligkeit steuern.
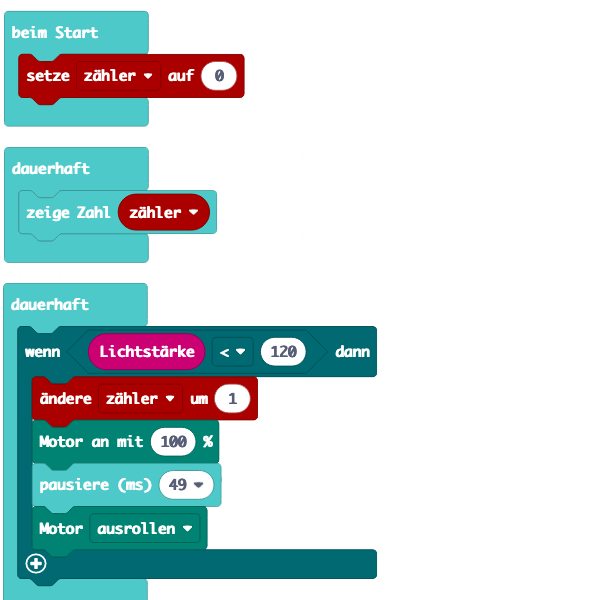
Hier dasselbe Programm nur statt mit Tastschalter eben mit dem Lichtsensor. Das Calliope muss im Automat dann aber so montiert sein, dass das LED Display zu sehen ist. Denn darin steckt der Helligkeitssensor. Wenn man mit der Hand näher kommt, wird es dunkel und dann löst der Motor aus.
So kannst du zwei Motoren über zwei externe Tastschalter ansteuern.
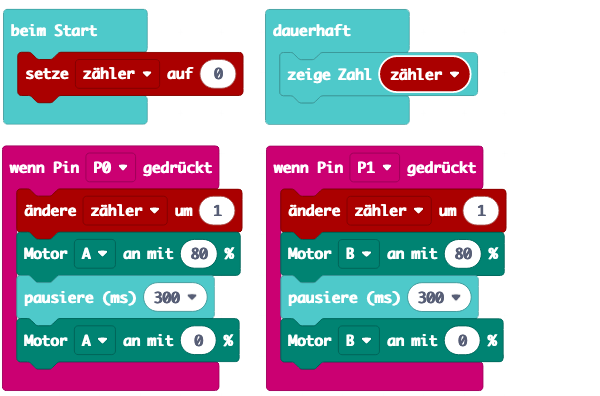
Wichtig ist, dass du die Pins 0 und 1 nicht verwechselst. Auch die Motorenbezeichnung ist entscheidend. Hier wird Motor A mit P0 und Motoren B mit P1 angesteuert.
Achtung: Die Motoren müssen richtig angeschlossen werden (s. unten). Je nach Stärke deiner Batterie brauchst du noch eine zusätzliche Stromversorgung (s. unten). Getriebemotoren funktionieren häufig nur mit Werten grösser als 80. Vielleicht musst du hier etwas experimentieren.
Zwei Motoren und eine extra Stromversorgung anschliessen.
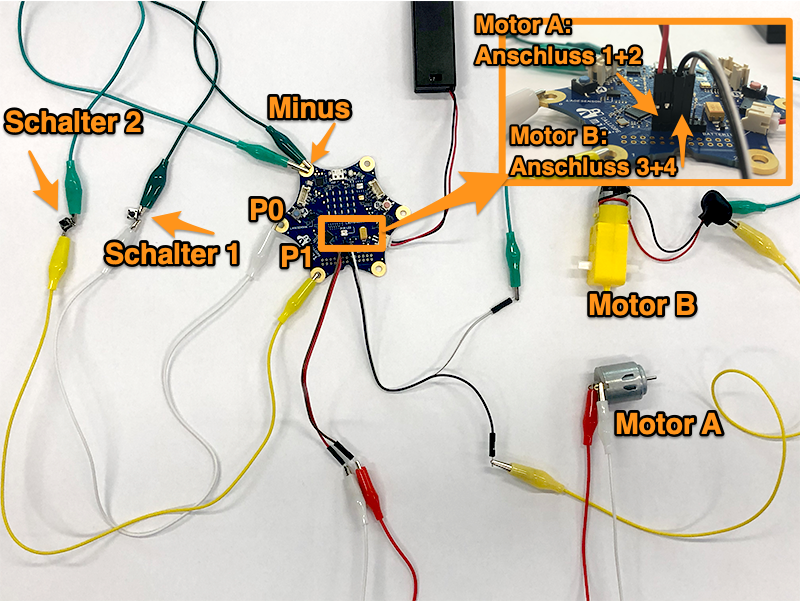
So schliesst du zwei Motoren an das Calliope an.
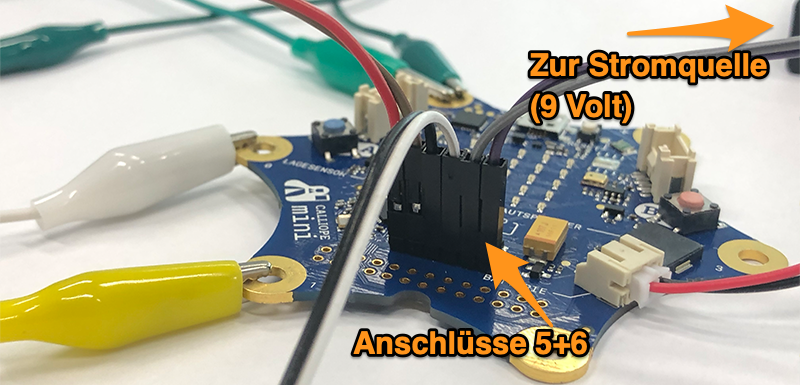
Eine externe Stromquelle kannst du am Anschluss 5 und 6 anschliessen. Maximal 9Volt.
Hinweise für Lehrpersonen

Der gesamte Content von makerstars.org/ ist creative commons lizenziert.
.
Didaktische Hintergrundinformationen zu dieser Challenge können Sie einsehen und downloaden, wenn Sie sich hier kostenlos anmelden.
[member]
Didaktische Hinweise
Die Challenge im Überblick
| Challenge | Zeit | Aufgabentyp | Schwierigkeitsgrad | Kreativität und Tüfteln |
|---|---|---|---|---|
| Mit Computer | 90+ Minuten; es handelt sich hierbei um eine Mindestzeitangabe! | Auftragsorientierte Umsetzung | mittel | technisches Problemlösen; ästhetische Gestaltung des Automaten |
Für den interaktiven Automat entwickeln die Schülerinnen und Schüler geeignete Ausgabemechanismen und finden Lösungen, wie interaktive, digitale gesteuerte Funktionen integriert werden können. Es gibt vielfältige Möglichkeiten, die verfügbaren Funktionen des Calliope Mini Bords einzusetzen.
Challengecards – Download
Die Challengecard «Interaktiver Kaugummiroboter» kann hier als pdf-Vorlage heruntergeladen werden. Der QR-Code auf der Challengecard leitet die Schülerinnen und Schüler direkt auf das betreffende Onlineangebot.
Lehrplanbezug (Lehrplan 21)
| Fach | Kompetenz | Kompetenzziele | Konkret in der Challenge |
|---|---|---|---|
| Natur, Mensch, Gesellschaft (NMG) | NMG.3.2.c | Die SuS können verschiedene Energieformen (z.B. Bewegungs-, Lage-, elektrische, thermische, chemische Energie) benennen und bestimmten Energieträgern oder Anwendungen im Alltag zuordnen (z.B. Wind, Wasser, Sonnenstrahlung, Holz, Erdöl, Nahrung). | Die SuS nutzen die Lageenergie von Süssigkeiten für die Ausgabefunktion des Automaten. |
| NMG.5.1.d | Die SuS können zentrale Elemente von Konstruktionen bei Bauten und technischen Geräten und Anlagen entdecken, modellartig nachkonstruieren und darstellen (z.B. Winkel-, Zickzack- und U-Profile aus Papier und Karton, Umlenkrollen mit Fadenspulen, Ausgleichsgewichte bei Barrieren, Zugbrücken, Fallschirm, Heissluftballon). | Die SuS können ihre Alltagserfahrungen mit Automaten und deren Funktionsweise nutzen, um Prototypen für eigene Automaten zu entwickeln. | |
| Medien und Informatik (MI) | MI.1.1f | Die SuS können Chancen und Risiken der zunehmenden Durchdringung des Alltags durch Medien und Informatik beschreiben (z.B. Globalisierung, Automatisierung, veränderte Berufswelt, ungleiche Möglichkeiten zum Zugang zu Information und Technologie). | Die SuS konstruieren selbst Automaten und stellen – angeregt durch die pädagogische Begleitung – ihre Erfahrungen in den Kontext des allgemeinen Trends zur Automatisierung. |
| MI.2.2.f | Die SuS können Programme mit Schleifen, bedingten Anweisungen und Parametern schreiben und testen. | Die SuS verwenden Programmierbefehle wie «dauerhaft» (Schleife). Sie arbeiten mit Variablen um die Impulse über die PIN-Anschlüsse am Calliope zu zählen. Für alternative Zählsysteme benötigen sie ggf. weitere Sensoren (z.B. Helligkeit, Lagesensor). | |
| MI.2.3.l | Die SuS kennen die wesentlichen Eingabe-, Verarbeitungs- und Ausgabeelemente von Informatiksystemen und können diese mit den entsprechenden Funktionen von Lebewesen vergleichen (Sensor, Prozessor, Aktor und Speicher). | Die SuS arbeiten gezielt mit Sensoren (z.B. Helligkeit, Lage) um Aktoren (LEDs, Lautsprecher) anzusteuern. | |
| Technisches und textiles Gestalten (TTG) | TTG.2.B.1.4c | Die SuS setzen sich mit mechanisch-technischen Grundlagen auseinander und können diese funktional und konstruktiv anwenden (Fachbildung beim Weben, Rad, Getriebe). | Die SuS wenden mechanische Grundlagen bei der Konstruktion eines Automaten-Prototypen an (z.B. Zahnradgetriebe, Wellen, Wippen). |
| TTG.2.B.1.5c | Die SuS kennen Maschinen und Transportmittel und können Funktionsmodelle bauen. | Die SuS können ein funktionierendes Modell eines Automaten entwickeln. |
Nötige Vorkenntnisse
Die Schülerinnen und Schüler haben schon Erfahrungen mit mechanischen Kaugummiautomaten gesammelt und können die Konstruktionsprinzipien nun mit digitaler Technologie anreichern. Idealerweise haben die Schülerinnen und Schüler die Calliope Basis-Challenges bearbeitet und können den Helligkeitssensor, den Soundsensor und den Lagesensor sowie die Pins gezielt nutzen.
Hinweise zur pädagogischen Begleitung
Mechanik
Anspruchsvoll ist die Konstruktion der Ausgabemechanik. Eine einfache Lösung ist ein Drehmechanismus, wie man ihn von analogen Kaugummiautomaten kennt. Hierfür wird allerdings ein Getriebemotor benötigt, der das Rad in langsamer Geschwindigkeit dreht.

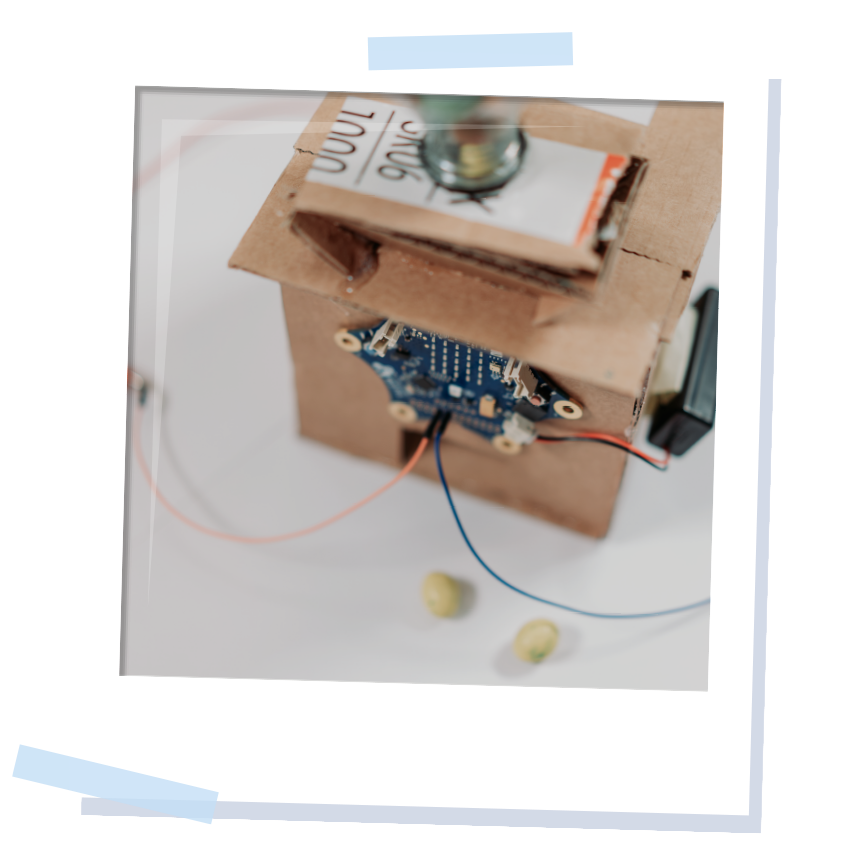
Dieser Prototyp aus Pappe arbeitet mit einem Drehmechanismus mit Vertiefung, in die die Kaugummis für die Ausgabe fallen und herausgedreht werden.
Geräuschgesteuerter Automat
Ein spannendes Projekt ist ein soundgesteuerter Automat, der Kaugummis ausgibt, sobald er ein Geräusch mit einer gewissen Lautstärke und Länge empfängt. Der Soundsensor im Calliope ist allerdings etwas versteckt und lässt sich nur im Bereich «Pins» ansteuern.

Dieses Programm steuert einen Motor an, sobald der Wert für den Geräuschsensor (MIC) höher ist als 800. Der Sensor kann Werte zwischen 0 und 1023 aufnehmen. Ein Wert von 600 ist bereits in einer ruhigen Umgebung erreicht. Beim Wert von 800 muss man schon relativ laut rufen.
Achtung: Der Wert für die Motordrehzahl sollte höher als 90 sein. Ansonsten reicht die interne Stromversorgung nicht aus, um den Motor anzusteuern.
Geräuschlänge einstellen
Mit diesem Programm kann zusätzlich die Länge des Geräuschs in die Bedingung aufgenommen werden. Der Motor wird nur angesteuert, wenn der Lautstärkewert über 800 beträgt und gleichzeitig die Länge des Geräuschs grösser als 10000 Mikrosekunden (1 Sekunde) ist. Hierfür braucht es aus dem Logik-Bereich eine «und-Bedingung» und aus dem Pins-Bereich (Fortgeschrittene) den Befehl «Impulsdauer».

[/member]